Les comparto 2 de los códigos que use para el proyecto de la zapatilla automatizada, espero que les sirva y cualquier consulta me dejan un comentario o me contactan por cualquiera de los otros métodos.
manejo_relay.py
import RPi.GPIO as GPIO
import sys
relay= str(sys.argv[1:2])
relay= relay.partition('\'')[-1].rpartition('\'')[-3]
opt= str(sys.argv[2:])
opt= opt.partition('\'')[-1].rpartition('\'')[0]
relay= int(relay)
opt= int(opt)
# Verificar variable relay
#print relay
# Verificar variable opt
#print opt
# Seleccionar la numeracion de los pines
GPIO.setmode(GPIO.BOARD)
# Desactivar advertencias
GPIO.setwarnings(False)
# Seleccionar los pines como salida
GPIO.setup(relay, GPIO.OUT)
# Dependiendo OPT enciende o apaga el relay
if opt==1:
GPIO.output(relay, True)
print 'Se prende relay ', relay
else:
GPIO.output(relay, False)
print 'Se apaga relay ', relay
#GPIO.cleanup()
para ejecutarlo: sudo python manejo_relay.py [numero_relay_pin] [0/1]
Y les dejo adicionalmente un simple PHP ( gpio.php ) para manejar los relay por web:
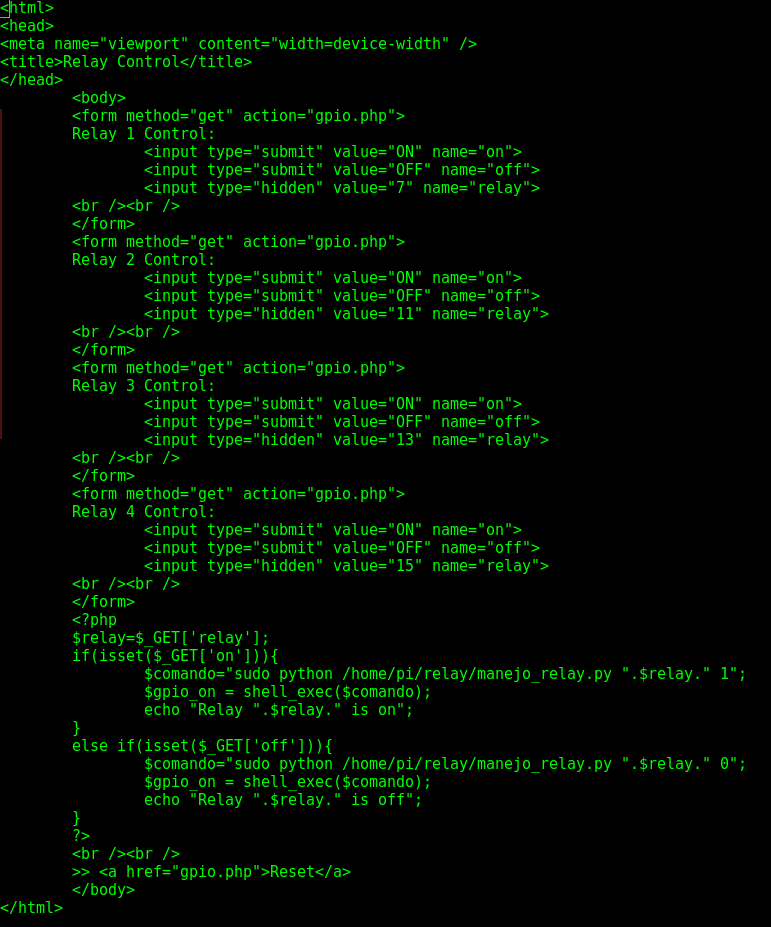
De mas esta decir que este PHP no esta preparado para estar publico, ya que en ese caso habría que sanitizar las variables de entrada para que no se pueda ejecutar un XSS.