Voy a explicar en un par de lineas e imágenes como armarse tu propio Drone o Quadcopter, la diferencia entre estos dos es que el primero tiene características que le dan la posibilidad de realizar vuelos autónomos.
Antes de empezar a armar, es fundamental que lean bastante sobre el tema o por lo menos que vean varios tutoriales en YouTube, las cosas que les comento en este post son en base a mi experiencia, varias gracias al famoso método de “prueba y error”, tengamos en cuenta que un error con este tipo de aparatos nos puede salir caro, así que tenga mucho cuidado.
Que necesitamos:
- Transmisor y receptor RC
- Frame ( yo use uno de 450mm, el F450 ).
- 4 motores.
- 4 ESC ( es el que controla la velocidad del los motores, y nos ayuda a conectar nuestro receptor con 12v de la bateria )
- Controladora de vuelo ( yo use un Arducopter 2.8 que da la posibilidad de hacer un Drone ).
- (extra) GPS ( en caso que quieran hacer un Drone ), yo use un NEO 6M.
- Batería LiPo
- Balanceador / Cargador de baterías de LiPo
- Tester de voltaje de batería
- Balanceador de Palas
- (extra) Dispositivos de telemetría ( transmisor y receptor )
- (extra) Dispositivo de información de vuelo para telemetría
- Borneras de conexión ( para conectar motores y ESC )
- Cinta aisladora
- Cables ( con 1.5mm alcanza para las conexiones de 12v de la batería a los ESC )
- Herramientas varias ( Cúter, Alicate, Tijera, Destornilladores ).
Transmisor y receptor
De por lo menos 6 canales de 2.4Ghz
Yo utilice uno que tenia de un helicóptero KDS 450, que es un KDS 7x ( transmisor ) y k-8x ( receptor ), configurado en modo avión.
La conexión se realiza de la siguiente manera:
- Receptor ( mirar manual donde esta cada comando ) -> Arducopter ( leer manual para las conexiones ) -> ESC’s -> Motores
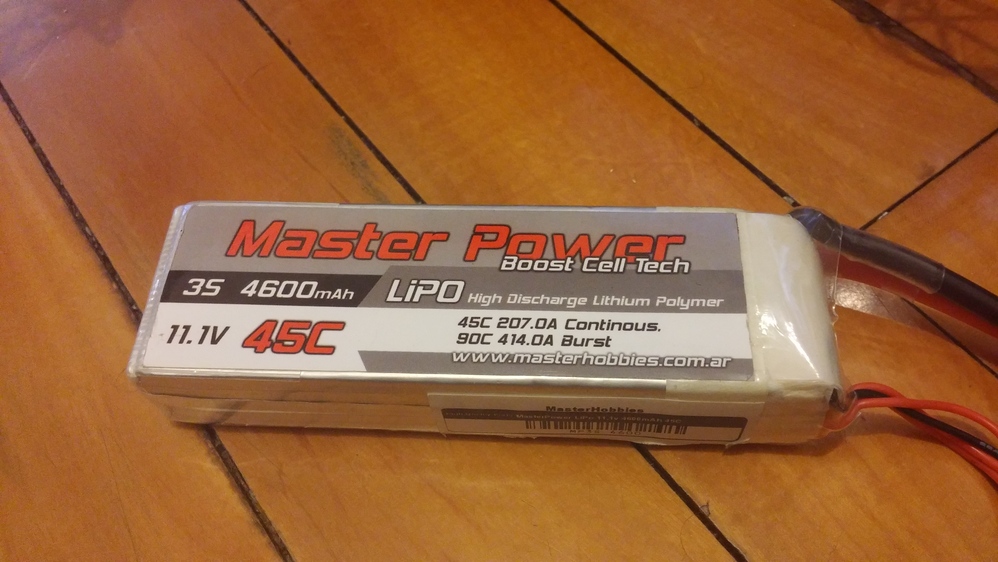
Batería
De por lo menos 2200mah y 40c de descarga ( dependiendo del consumo de los motores y el peso del aparato podes tener una autonomía de hasta 10min ), yo use de 4600mah 45c de descarga y picos de 90c ( estos picos son fundamentales cuando le das todo el motor al mango en menos de 1seg, los tipicos “motorazos” ).
Frame
Estaba buscando un frame mediano, ni tan grande ni tan chico, y lo que mejor se adecuo a lo que buscaba era un F450 ( como su nombre lo indica tiene 450mm de distancia en linea recta entre motores ).

Mientras más liviano sea el frame ( y todo ) mejor. El peso es algo fundamental, dado que a mayor peso mayor es la potencia de los motores que tenemos que usar y el consumo de batería esta vinculado directamente con todo esto.
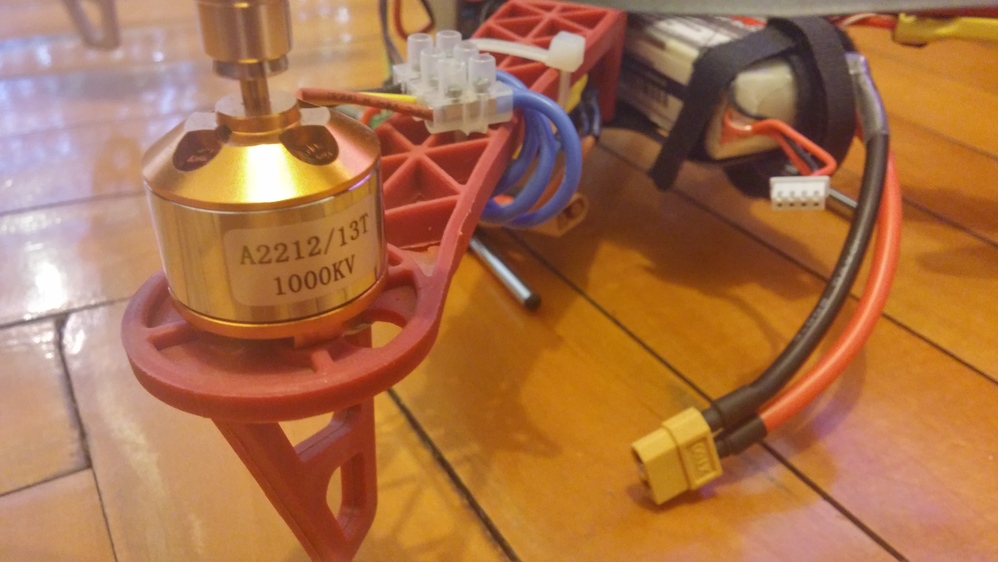
Motores y ESC
Mi elección fueron 4 motores de 1000kv ( con 960kv para el frame que elegi es más que suficiente pero la idea era poder montar una GoPro ), los motores son: A2212/13T.
Los ESC van en relación al consumo de los motores, en mi caso utilice unos genéricos de 30A. Se conecta por un lado 12v + salidas de arducopter y por el otro los motores.

Controlador de vuelo
Me decidí por el Arducopter 2.8, dado que es un controlador basado en Arduino el cual tiene muchas posibilidades. Este tipo de controlador deja realizar vuelos programados por gps y tomar decisiones en casos de falla ( mala señal, poca bateria, etc. ) o simplemente el Return to Home ( tocando un botón del control el drone vuelve a su posición inicial ).
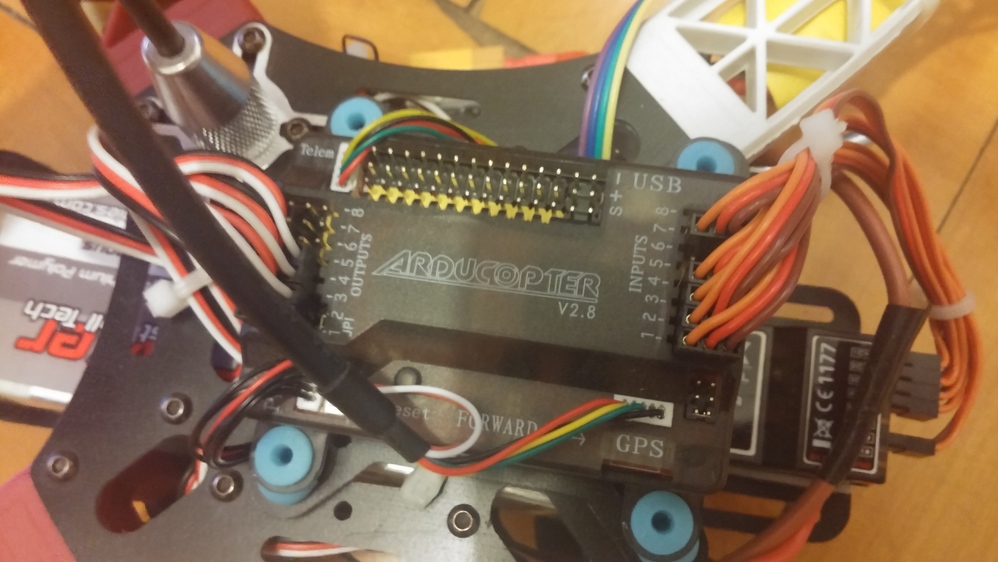
Como se puede ver en mi caso tengo conectado un GPS NEO 6M para poder realizar vuelos autónomos ( los cuales se programan desde el Software Mission Planner antes de salir a volar ).
Los input son los outputs del receptor de nuestro transmisor RC, y los outputs del Arducopter son los que se conectan a cada uno de los ESC’s.
Balanceador de palas
Sumamente importante para que nuestro Drone / Quadcopter funcione bien, el proceso de balanceo de cada una de las palas es primordial. Acá el tutorial: : https://www.youtube.com/watch?v=-vakWrc86xE

Balanceador de baterias
Para preservar la vida de nuestra batería es importante que compremos un buen producto, el cual hay que mirar las especificaciones dado que la velocidad de carga tiene relación directa con el tipo de batería que compremos.
En mi caso me decidí por un : Venom PR2

Dispositivos de telemetría
- Un dispositivo que sirve para conectar el Drone / Quad de forma Wireless dentro de la frecuencia de 915mhz
- Otro dispositivo que nos da velocidad ( tambien trabaja con el GPS ), inclinación, velocidad de ascenso ( tiene un sensor de presión ), etc.
- Power Manager, esto se conecta al Arducopter y nos envía por telemetría el voltaje de la batería en tiempo real.
Con estos dispositivos tenemos datos en tiempo real en nuestra notebook sobre el estado del Drone / Quad, son extras, no son excluyentes pero nunca esta de sobra tener dichos datos para poder prevenir accidentes por falta de batería u otras causas.


Adicionalmente, para aumentar la seguridad de vuelo en caso que no tengamos el Drone / Quad conectado a la notebook, uso un Tester de voltaje con beeper ( se le configura un voltaje mínimo, en caso de que la batería llegue a dicho valor el mismo empieza a emitir un “beep” bastante fuerte que nos deja aterrizar el aparato de forma segura antes de quedarnos sin batería y perder el control del mismo ).
Información general:
- No todos los motores giran para el mismo lado, revisar la configuración en el manual o software del controlador de vuelo. Para cambiar el sentido de giro, simplemente hay que dar vuelta 2 de los 3 cables de conexión hacia el ESC.
- Setear bien el valor mínimo de operación de la batería para no arruinarla, en mi caso lo uso en 3.8v por celda.
- No dejar la batería descargada, cargar y balancear cada vez que la usemos, en caso de guardarla por un periodo largo almacenar con el 70/75% de carga.
- Telemetría, revisar bien las conexiones de Tx/Rx, si están mal conectados no vamos a conseguir conexión o datos del Drone / Quad. Fundamental leer la documentación de los dispositivos a conectar.
- Seguridad ante todo !!! Antes de realizar los primeros vuelos, realizar todas las pruebas que se puedan con el equipo bien asegurado a tierra, una mala configuración puede hacer que el mismo prenda los motores al máximo de potencia o se dispare hacia cualquier parte. No volar el Drone / Quad en lugares con gente cerca o donde se puedan producir daños a personas o cosas, una vez terminado puede estar pesando 1.5kg o 2kg, el impacto con velocidad puede ser mortal para las personas ( sobre todo teniendo el cuenta el filo de las palas ) o grandes daños a cosas materiales.
- Una vez terminado, realizar todos los pasos de configuración que requiera el controlador de vuelo con los motores desconectados o sin las palas en su lugar.
- En caso de Arducopter, cuando hayamos terminado de armar todo es necesario configurar los acelerometro y magnetómetros, el proceso esta explicado paso a paso en el software ( APM Planner / Mission Planner ), el mismo se puede usar desde OSx, Gnu/Linux o Windows. Las configuraciones iniciales recomiendo hacerlas por el USB no por la conexión de telemetría.
- Antes de empezar todo, asegurse de tener la documentación, leer en Internet sobre experiencias de otros usuarios con las cosas que vayamos a utilizar y ver todos los tutoriales que necesitemos en YouTube sobre el armado y/o operación de los mismos.
- Recomiendo ampliamente utilizar un “tren de aterrizaje” para proteger al aparato en caso de “aterrizajes de emergencia” jeje
- Tener cuidado y revisar que todas las conexiones estén bien realizadas y lo suficientemente ajustadas para que no se aflojen en caso de vibraciones o golpes.
- No montar una cámara hasta tener muy clara la operación del mismo sin nada.
- Batería, tener en cuenta a que a mayor “mah” la misma pesa más, eso quiere decir que no en todos los casos es mejor que la batería sea más grande sino que capaz es mejor tener más de una.
- Recomiendo que el controlador de vuelo se ponga en una base anti-vibratoria, se puede ver en las imagenes unas bases conectadas por unos “silicon rings damper” celestes. Esto mejora mucho la estabilidad del aparato, no nos olvidemos que el Arducopter esta compuesto de sensores los cuales son fundamentales para la estabilidad del mismo, si estos sensores se someten a muchas vibraciones la estabilidad del aparato se vera seriamente perjudicada.
- Balancear el peso, distribuir los componentes de forma que quede lo mejor posible balanceado el peso en todo el frame.
Con este pequeño resumen de mis experiencias espero poder ayudado 😀
1 thought on “Como armar tu propio Drone”